![[PukiWiki]](image/pukiwiki.png "[PukiWiki]")
FΙ‘ΈσΛΥ¥πΛ≈Λ≠ΓΛήΑΞίΓΦΞιάΰΛΈΨπ σΛρΖΉΜΜΛΖΛΤΛ·ΛλΛκ
fmatrixΛΈΨπ σΛΥ¥πΛ≈Λ≠ΓΛpointsΤβΛΈ≈άΛΥ¬–±ΰΛΙΛκΡΨάΰΛΈ ΐΡχΦΑΛρΖΉΜΜΛΙΛκ
#geshi(c++,number){{
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/calib3d/calib3d.hpp>
#include <iostream>
const char windowName[] = "Test";
const char LeftImageFileName[] = "hogehoge\\Left.jpg";
const char RightImageFileName[] = "hogehoge\\Right.jpg";
const int pointCount = 10;
using namespace cv;
int main(int argc, char** argv);
// ¬–±ΰΛΙΛκΤΟΡß≈άΛρ≈§≈ωΛΥΤ…ΛΏΙΰΛύ¥ΊΩτΓΞ
void readPointsLeft(const Mat& imageLeft, Mat& pointsLeft);
void readPointsRight(const Mat& imageRight, Mat& pointsRight);
// ήΑΞίΓΦΞιάΰΛρ…Ν≤ηΛΙΛκ¥ΊΩτ
void drawEpilines(Mat& image, std::vector<Vec3f> lines, std::vector<uchar> mask);
// ΡΨάΰΛΈ ΐΡχΦΑΛ§ΛΔΛκxΚ¬…ΗΛρΡΧ≤αΛΙΛκΛ»Λ≠ΛΈyΚ¬…ΗΛρΒαΛαΛκ
inline double solveY(Vec3f efficient, double x);
// ΓΏ≈άΛρ…Ν≤ηΛΙΛκ¥ΊΩτ
void drawCross(Mat& image, Mat& points);
// ≤ηΝϋΛρ2Υγ…Ν≤ηΛΙΛκ¥ΊΩτ
void showBothImage(Mat *image);
int main(int argc, char** argvv){
// 2ΥγΛΈ≤ηΝϋΓΞ
Mat inputImage[2];
inputImage[0] = imread(LeftImageFileName); // Ξ’ΞΓΞΛΞκΧΨΛρ≈§≈ωΛΥάΏΡξ
inputImage[1] = imread(RightImageFileName); // Ξ’ΞΓΞΛΞκΧΨΛρ≈§≈ωΛΥάΏΡξ
// 2ΥγΛ»Λβ…ΫΦ®
showBothImage(inputImage);
// ≥Τ≤ηΝϋΛΪΛιΤΟΡß≈άΛρΤ…ΛΏΙΰΛύ
// ΚΘ≤σΛœΜωΝΑΛΥΦηΛΟΛΩΤΟΡß≈άΛρΞœΓΦΞ…Ξ≥ΓΦΞ«ΞΘΞσΞΑΛΖΛΤΛΔΛκ
Mat points[2];
readPointsLeft(inputImage[0], points[0]);
readPointsRight(inputImage[1], points[1]);
// ≤ηΝϋΛΥΤΟΡß≈άΛρΓΏΛ»ΛΖΛΤ…Ν≤η
for(int i = 0;i < 2;i++){
drawCross(inputImage[i], points[i]);
}
// 2ΥγΛ»Λβ…ΫΦ®
showBothImage(inputImage);
Mat FMatrix; // FΙ‘ΈσΆ― ―Ωτ
std::vector<uchar> mask; // FΙ‘ΈσΖΉΜΜΛΥΜ»ΛοΛλΛΩΤΟΡß≈άΛρ…ΫΛΙ ―Ωτ
// FΙ‘ΈσΛρΖΉΜΜ
// Λ≥Λ≥Λ«whichImageΛΈ1ΛΪ2Λ§ΖηΛόΛκΔ≠Λ≥Λ≥ΛΥΤΰΛκΛΈΛ§1»÷ΛΈ≤ηΝϋ
FMatrix = findFundamentalMat(points[0], points[1], mask);
// ΓΓΓΓΓΓΓΓΓΓΓΓΓΓΓΓΓΓΓΓΓΓΓΓΓΓΓΓΓΓΓΓΓΓΓΓΓΓΓΓΔ§Λ≥Λ≥ΛΥΤΰΛκΛΈΛ§2»÷ΛΈ≤ηΝϋ
for(int i = 0;i < 2;i++){
std::vector<Vec3f> lines;
// FΙ‘ΈσΛ»ΤΟΡß≈άΛΪΛιΓΛήΑΞίΓΦΞιάΰΛΈ ΐΡχΦΑΛρΖΉΜΜ
computeCorrespondEpilines(points[i], 1+i, FMatrix, lines);
// Δ§Λ«ΖΉΜΜΛΒΛλΛΩήΑΞίΓΦΞιάΰΛΈ ΐΡχΦΑΛρΗΒΛΥ…Ν≤η
drawEpilines(inputImage[1-i], lines, mask);
}
// 2ΥγΛ»Λβ…ΫΦ®
showBothImage(inputImage);
// ΞΠΞΘΞσΞ…ΞΠΛρ«Υ¥ΰ
destroyWindow(windowName);
return 0;
}
// ΤΟΡß≈άΛΈΚ¬…ΗΛρ≥ «ΦΛΙΛκ¥ΊΩτ
// ≥ «Φ ΐΥΓΛœ≈§≈ωΛ«Έ…ΛΛΛ§ΓΛ≥ «ΦΫγΛΥΟμΧή
void readPointsLeft(const Mat& imageLeft, Mat& pointsLeft){
static float points[] = { 17,175, // x1, y1,
370,24, // x2, y2,
192,456, // Γß
614,202, // Γß
116,111, // Γß
305,32, // Γß
249,268, // Γß
464,157, // Γß
259,333, // Γß
460,224};// x10, y10
// floatΛΈ«έΈσΛρΗΒΛΥMatΛρΚνά°
// double (CV_64F)ΛΥΛΙΛκΛ» findFundamentalMat Λ«assertionΞ®ΞιΓΦΛ§Ϋ–ΛκΛΈΛ«ΟμΑ’
// CV_32FC2 ΛΥΛΖΛΩΛΈΛœΓΛΞ«ΓΦΞΩΛΈ≥ «Φ ΐΥΓΛρΛοΛΪΛξΑΉΛ·ΛΙΛκΛΩΛα
pointsLeft = Mat::Mat(cv::Size(1, pointCount), CV_32FC2, (void*)points);
}
// ¥πΥή≈ΣΛΥ readPointsLeft Λ»Τ±ΛΗ
void readPointsRight(const Mat& imageRight, Mat& pointsRight){
static float points[] = { 295,28,
584,221,
67,172,
400,443,
330,9,
480,140,
181,140,
350,265,
176,193,
333,313};
pointsRight = Mat::Mat(cv::Size(1, pointCount), CV_32FC2, (void*)points);
}
// ΐΡχΦΑΛρΗΒΛΥΡΨάΰΛρ…Ν≤ηΛΙΛκ
void drawEpilines(Mat& image, std::vector<Vec3f> lines, std::vector<uchar> mask){
// ΡΨάΰΛΈ ΐΡχΦΑΛρ≥ «ΦΛΖΛΩvector
std::vector<Vec3f>::iterator it;
// Μ»ΛοΛλΛΩΤΟΡß≈άΞ’ΞιΞΑ
std::vector<uchar>::iterator itmask;
it = lines.begin();
itmask = mask.begin();
while(it != lines.end()){
if(*itmask == 0){
// mask ΛΈΟΆΛ§0Λ»ΛΛΛΠΛ≥Λ»ΛœΓΛΖΉΜΜΛΥΜ»ΛοΛλΛ ΛΪΛΟΛΩΛ»ΛΛΛΠΛ≥Λ»
it++;
itmask++;
continue;
}
if((*it)[1]){
// YΦ¥Λ»ΗρΛοΛκΡΨάΰΛΈΨλΙγ
double width = image.size().width;
// left Λœ x=0 ΛΥΛΣΛ±ΛκΡΨάΰΛΈΡΧ≤αΚ¬…Η
Point2d left = Point2d(0.0, solveY(*it, 0.0));
// right Λœ x=width ΛΥΛΣΛ±ΛκΡΨάΰΛΈΡΧ≤αΚ¬…Η
Point2d right = Point2d(width, solveY(*it, width));
// ΚΗΟΦΛΪΛι±ΠΟΦΛΥΡΨάΰΛρΑζΛ·
line(image, left, right, Scalar(0, 0, 255), 2);
}else{
// YΦ¥ΛΥ ΩΙ‘Λ ΡΨάΰΛΈΨλΙγ
// xΚ¬…ΗΛœΑλΡξΛ ΛΈΛ«ΓΛΛΔΛιΛΪΛΗΛαΒαΛαΛκ
double x = -(*it)[2]/(*it)[0];
// ≤ηΝϋΛΈΨεΟΦΛρΡΧ≤αΛΙΛκΚ¬…Η
Point2d top = Point2d(x, 0.0);
// ≤ηΝϋΛΈ≤ΦΟΦΛρΡΧ≤αΛΙΛκΚ¬…Η
Point2d bottom = Point2d(x, image.size().height);
// ΨεΟΦΛΪΛι≤ΦΟΦΛΥΡΨάΰΛρΑζΛ·
line(image, top, bottom, Scalar(0, 0, 255), 2);
}
it++;
itmask++;
}
}
// ΡΨάΰΛΈ ΐΡχΦΑΛ»xΚ¬…ΗΛΪΛιyΚ¬…ΗΛρΖΉΜΜΛΙΛκ
inline double solveY(Vec3f efficient, double x){
return - (efficient[0] * x + efficient[2]) / efficient[1];
}
// points Λ«ΆΩΛ®ΛΩΚ¬…ΗΛρΟφΩ¥ΛΥΓΏΑθΛρ…ΝΛ·
void drawCross(Mat& image, Mat& points){
Point2f cross1 = Point2f(2, 2);
Point2f cross2 = Point2f(2, -2);
for(int i = 0;i < points.size().height;i++){
Point2f point = Point2f(points.at<float>(i, 0), points.at<float>(i, 1));
line(image, point - cross1, point + cross1, Scalar(255, 255 - 20 * i, 20 * i));
line(image, point - cross2, point + cross2, Scalar(255, 255 - 20 * i, 20 * i));
}
}
// ΞΠΞΘΞσΞ…ΞΠΛΥ≤ηΝϋΛρ…ΫΦ®
void showBothImage(Mat *image){
namedWindow(windowName, CV_WINDOW_FREERATIO | CV_GUI_EXPANDED | CV_WINDOW_AUTOSIZE);
for(int i = 0;i < 2;i++){
imshow(windowName, image[i]);
waitKey(0);
}
}
}}
ΚΗΞΪΞαΞι≤ηΝϋΓΞΗΪΛ≈ΛιΛΛΛ±ΛλΛ…ΓΛΖΉ10≈άΓΏΑθΛ§…’ΛΛΛΤΛΛΛκΓΞ

±ΠΞΪΞαΞι≤ηΝϋΓΞΗΪΛ≈ΛιΛΛΛ±ΛλΛ…ΓΛΖΉ10≈άΓΏΑθΛ§…’ΛΛΛΤΛΛΛκΓΞ
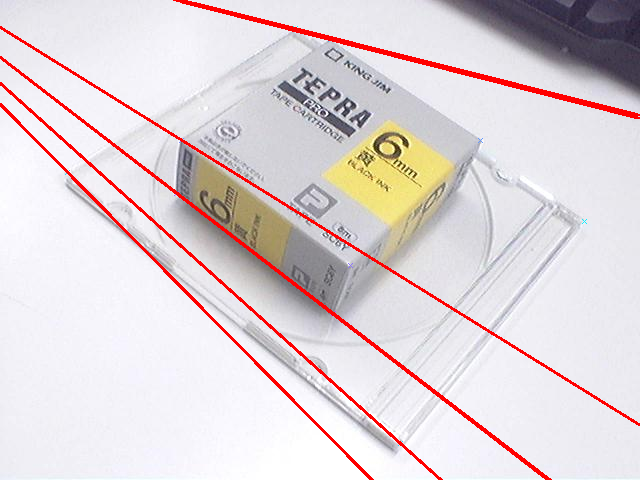
ΚΗΞΪΞαΞι≤ηΝϋΛΥΑζΛΛΛΩΓΛ±ΠΞΪΞαΞιΛΪΛι˸ήΑΞίΓΦΞιάΰΓΞ≤Ω≈άΛΪήΑΞίΓΦΞιάΰΛ§…ΝΛΪΛλΛΤΛ ΛΛ≈άΛœFΙ‘ΈσΛρΒαΛαΛκΚ«≈§≤ΫΛΈ≤αΡχΛ«ΓΛ≥ΑΛλΟΆΛ»ΛΖΛΤΛœΛΗΛΪΛλΛΩΟΆ

±ΠΞΪΞαΞι≤ηΝϋΛΥΑζΛΛΛΩΓΛΚΗΞΪΞαΞιΛΪΛι˸ήΑΞίΓΦΞιάΰΓΞ≤Ω≈άΛΪήΑΞίΓΦΞιάΰΛ§…ΝΛΪΛλΛΤΛ ΛΛ≈άΛœFΙ‘ΈσΛρΒαΛαΛκΚ«≈§≤ΫΛΈ≤αΡχΛ«ΓΛ≥ΑΛλΟΆΛ»ΛΖΛΤΛœΛΗΛΪΛλΛΩΟΆ
ΞΗΞψΞσΞκ:OpenCV:OpenCV 1.0:OpenCV 1.1:OpenCV 2.0:OpenCV 2.1:OpenCV 2.2ΫύΒρ
{kind=link}
{kind=link}
{kind=link}
{kind=link}